In modern manufacturing, pick-and-place robots equipped with pneumatic grippers are essential for feeding parts from vibratory bowl feeders onto automatic assembly machine. These robots use compressed air to control the opening and closing of grippers, allowing them to pick up components from one location and place them accurately into another. Pneumatic grippers are favoured for their reliability and ability to handle various shapes and sizes of parts, making them a cornerstone in automated assembly processes.
For optimal performance, it’s important that the robotic arm knows precisely when the gripper has released a part so it can promptly return to pick up the next item. Relying on preset time delays to estimate when a part is released can introduce delays, which eventually reduce the overall output of the assembly. By incorporating a reed switch to sense the exact moment the gripper releases the part, the robot can eliminate unnecessary waiting times, thus accelerating the overall operation.
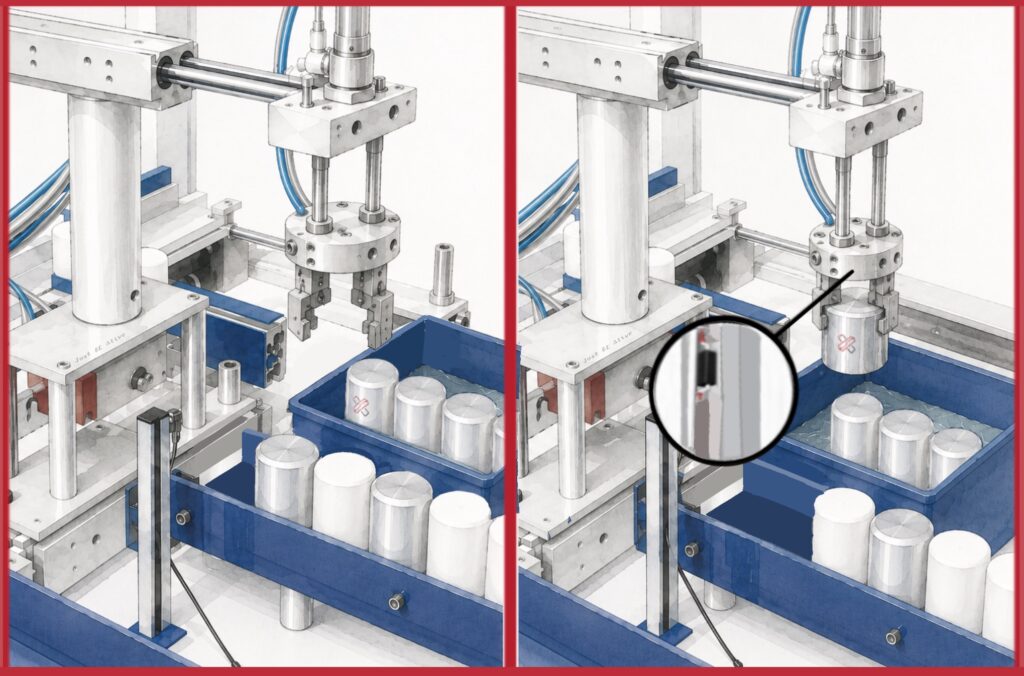
The implementation works by attaching a small magnet to the moving part of the pneumatic gripper mechanism. As the gripper opens to release the part, the magnet moves into alignment with a reed switch mounted on the stationary portion of the gripper’s side. This alignment closes the reed switch circuit, sending an immediate signal to the robot’s control system or PLC, indicating that the part has been released. The control system can then command the robotic arm to retract and proceed to the next task without delay. This real-time feedback loop significantly reduces cycle times, which is especially beneficial in high-speed automation where every millisecond counts.
By using reed switches in this manner, manufacturers can achieve faster response times and improve the efficiency of their pick-and-place robots. The precise sensing of the gripper’s release position allows for immediate action, eliminating the guesswork associated with time delays and enhancing the throughput of automated assembly lines.
🧰 Application Classification
Applications are classified as Position Sensing, Pulse Counting, Electromagnetic or Relay, Temperature Sensing or Magnet Biasing types. This application is classified as follows and the link gives more information on best practices to help select the most suitable AT band and matching magnet.
✅ Recommended Products
The Reed Switches and Sensors used in such pneumatic automation applications need to be robust, durable and efficient in meeting a high life expectancy. Our engineers work hard in life testing our products under various conditions, and our intention is to ensure end product durability and life. Although we wouldn’t want to restrict any of our products for use in only certain applications, the recommended products for use in this application are listed below.
